Home
Team Background
| Team Member | Contact Information | Field of Study |
|---|---|---|
| Feba Raju Abraham | fabraha3@asu.edu | Robotic Engineering |
| Charlotte Deming | cdeming1@asu.edu | Robotic Engineering |
| Andrei Marinescu | amarine3@asu.edu | Robotic Engineering |
Introduction
Our team is researching a razor clam and creating a bio-inspired robot capable of navigating vertical and horizontal crevices to use for pipe navigation, rescue missions, and more.
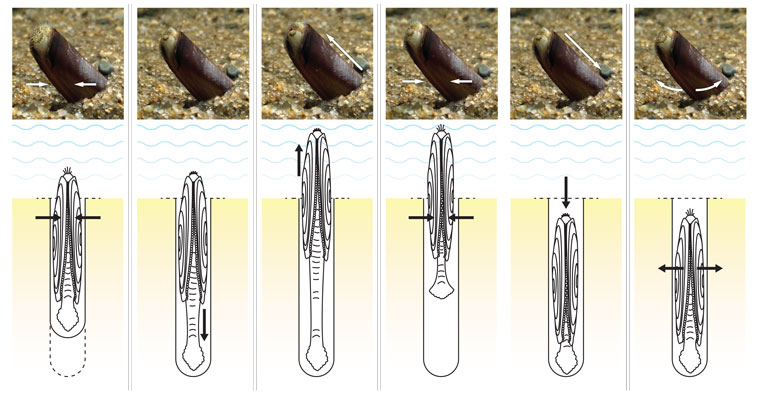
How the Razor Clam Digs: first the clam extends its “foot” downwards, then it pushes up its shell, before closing its shell suddenly (4th picture from left) which inflates its foot, thus helping its foot to act as an ‘anchor’ for the next stage of pulling its shell downwards. It then opens its shell again (far right picture), thus being ‘reset’ to repeat the digging cycle.
Research Question
How can we mimic the motion of a razor clam to create a bio-inspired foldable robot capable of scaling inclined spaces?
Background
Develop a Research Question
Biomechanics Background and Initial Specifications
Kinematics and Dynamics
Data Collection and Experimental Validation
Design Optimization
Design Validation
Manufacturing Planning
Design and Manufacturing Workflow
Note: this file is only viewable through Jupyter Notebook. Click here for .pdf version.
Additional Resources
Data Files
Videos/Images
CAD and Design Files
Code Files
Presentations
Presentation I
Presentation II
Presentation III
References
External Links
This project uses information from the Foldable Robotics Course created by Dr. Daniel Aukes.